A Pneumatic Glove with Closed-Loop Control and Bidirectional Actuation for Real-Time Pose Synchronization
Abstract
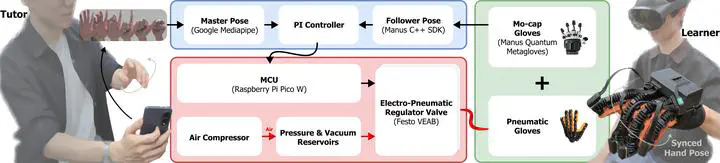
Soft pneumatic gloves provide lightweight, intrinsically safe haptic feedback, but such systems are often constrained by bulky pneumatic hardware and limited controllability. We present a compact and responsive pneumatic glove system enabled by positive-negative actuation capability. This bidirectional actuation is achieved using a single pneumatic unit, resulting in a system that is compact enough to fit within a desktop-sized form factor. The glove integrates soft actuators with commercial motion capture systems for hand pose tracking, enabling precise operation via closed-loop control. A modular middleware supports flexible operation with diverse hand pose sources, such as vision-based hand pose estimations from RGB cameras, HMDs, and depth sensors. This versatile yet compact platform extends the applicability of pneumatic gloves beyond rehabilitation to domains that require fast and responsive feedback, such as immersive remote training in VR.
Minwoo Lee
Master’s Student
Sungjoon Yoon
Undergraduate Researcher
Seungjae Oh
Assistant Professor
My research interests include interactive I/O technologies, Haptics, and game interaction techniques.